Gallery




Engineering Design Process
Reed believes in a 4 step Engineering Design Process -
Step 1: Brainstorm
Step 2: Research
Step 3: Prototype
Step 4: Final Build
Using this process, engineers can create really complex things by breaking it down to the basics and being able to attack those basics one at a time. The great thing about this process is that it scales. From the smallest project to landing a vehicle on the moon, this process works for all sizes.

Resume
Reed has worked in robotics for over 6 years. He has designed several electro-mechanical systems and unmanned ground vehicles. His specialties include robotics and machine learning.
Education
April 2020
May 2017
Minneapolis, Minnesota
M.S. Mechanical Engineering
B.S. Mechanical Engineering
University of Minnesota - Twin Cities
Experience
Boon Logic Minneapolis, Minnesota
Machine Learning Engineer June 2019 to present
Assisted in designing the mechanical aspects, including hardware and mounting, of an automated visual inspection machine for detecting defects and particulates in bottles
Generated proof of concept solutions for various companies using the unsupervised machine learning algorithm
Programmed Siemens and Omron PLCs using ladder logic and structured text languages
Mechanical Engineering Department - University of Minnesota Minneapolis, Minnesota
Graduate Teaching Assistant August 2017 to May 2019
Designed a 10 week supplemental lab course to a graduate level robotics class using two UR5 robotic arms for 40+ students
Modeled and manufactured experimental fixtures and PCBs for the lab modules
Wrote detailed lab manuals and assisted in the writing of tests for the course
Danfoss Power Solutions Minneapolis, Minnesota
Mechanical Engineer May 2017 to May 2019
Assisted in the development of an autonomous utility tractor utilizing LIDAR, RADAR, and Ultrasonic sensors while using Robot Operating System (ROS)
Designed and had manufactured a $15,000+ fiberglass cowling using Unigraphics NX to cover the seating area on the tractor
Enabled a Palfinger crane to move autonomously in a workspace by retrofitting it with sensors and creating a software package to control the joints of the crane
Assisted in creating an autonomous airplane cargo loader that detects the available open cargo door using a LIDAR sensor and navigates the vehicle to the airplane
Modeled various different vehicles such as cranes and combine harvesters and creating simulation environments in ROS
Medical Robotics and Devices Lab - University of Minnesota Minneapolis, Minnesota
Mechanical Engineer January 2016 to February 2019
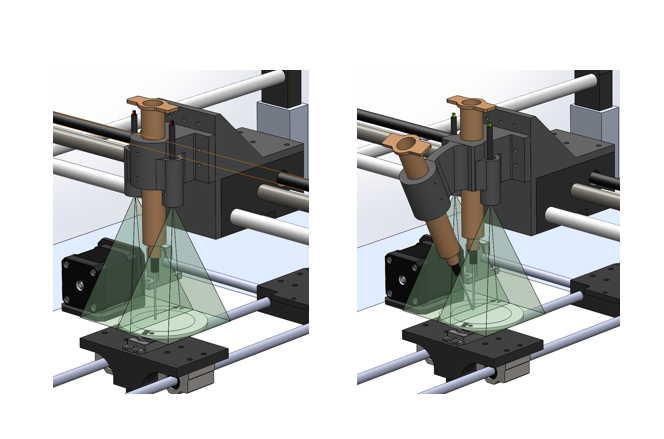
Designed and developed a delta style robot to 3D print on human anatomy while using MATLAB and C++ to control the robot
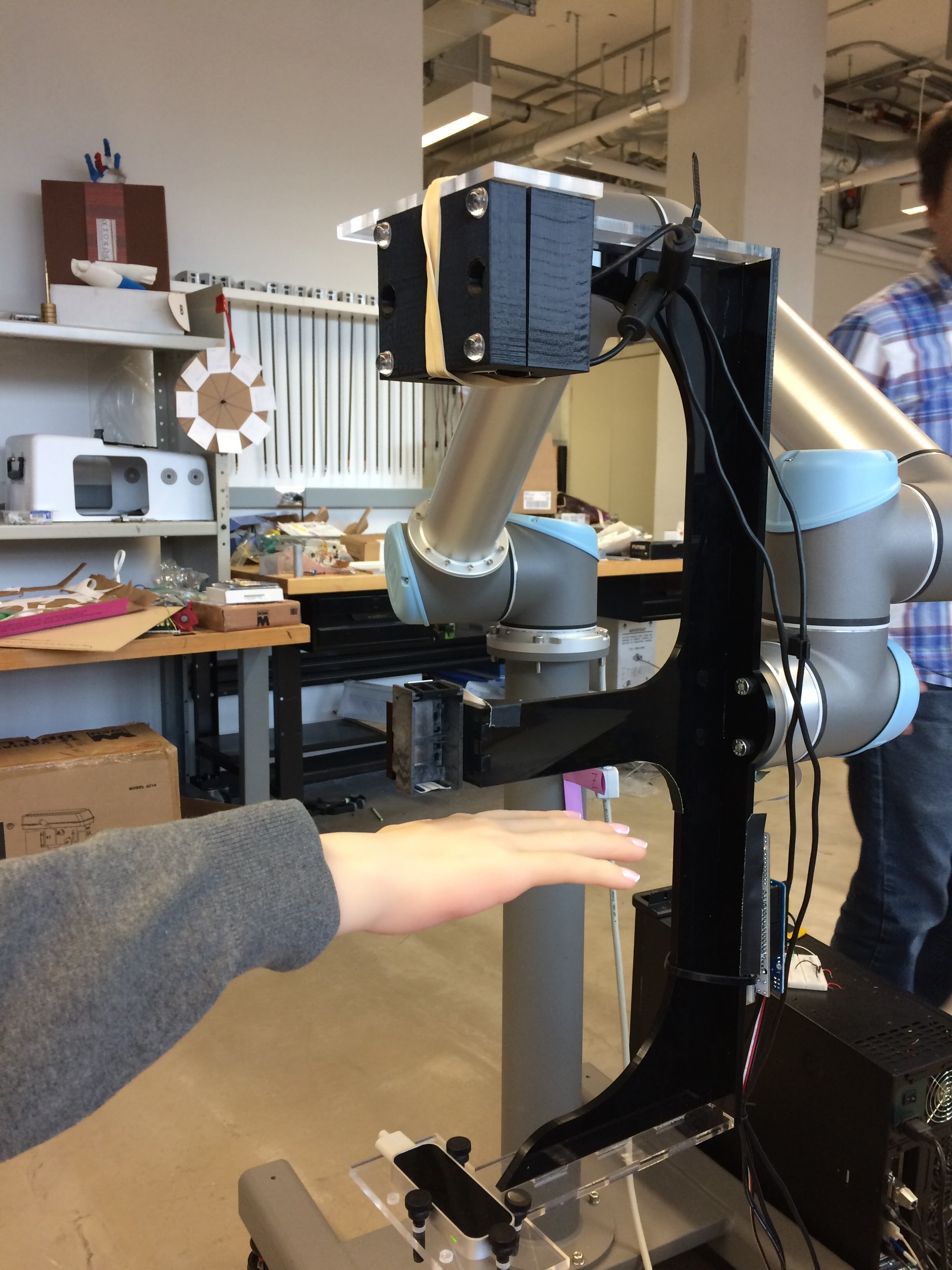
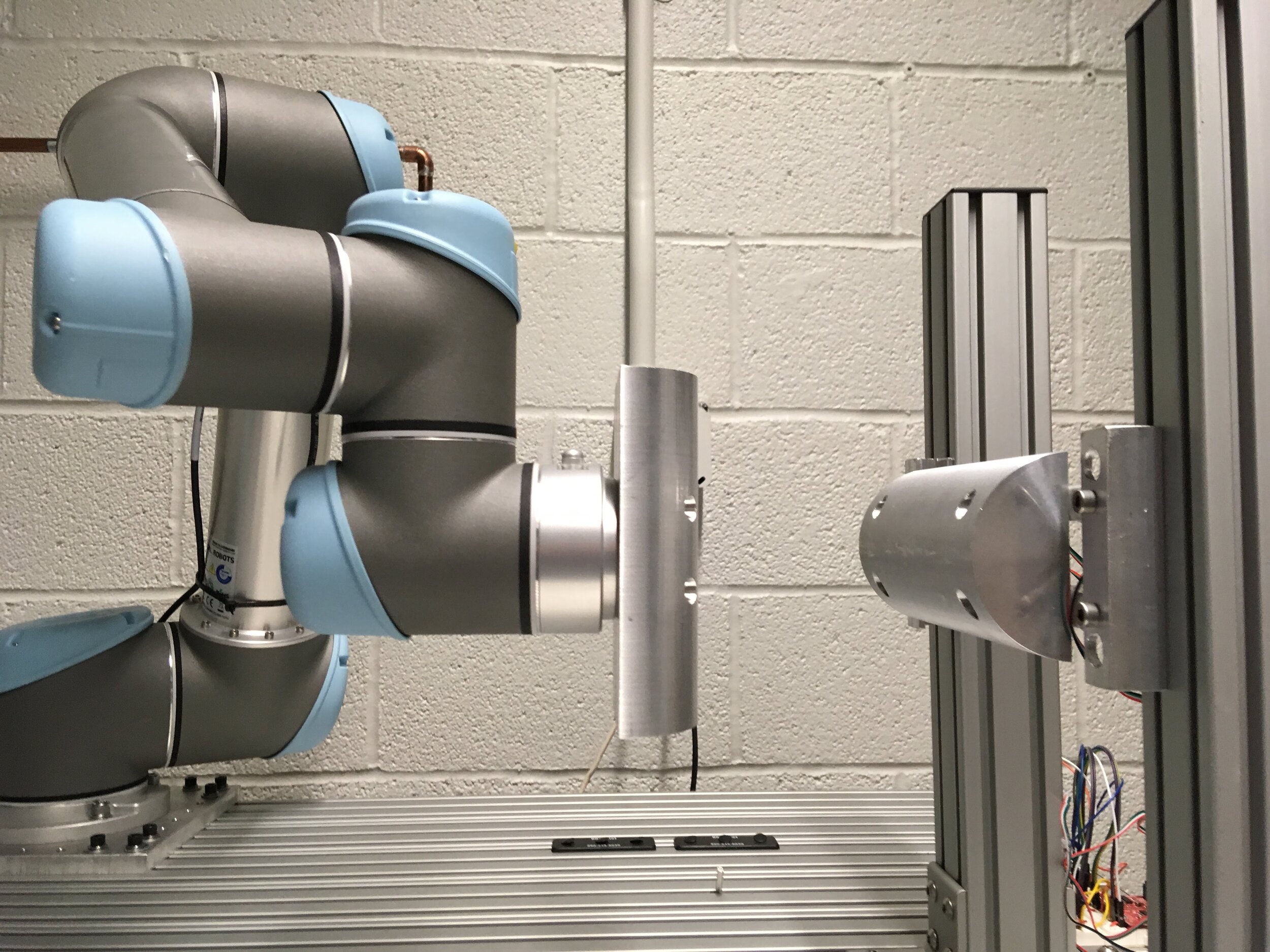
Assisted in developing a system that successfully 3D printed onto a moving hand utilizing a UR5 robotic arm and visual feedback
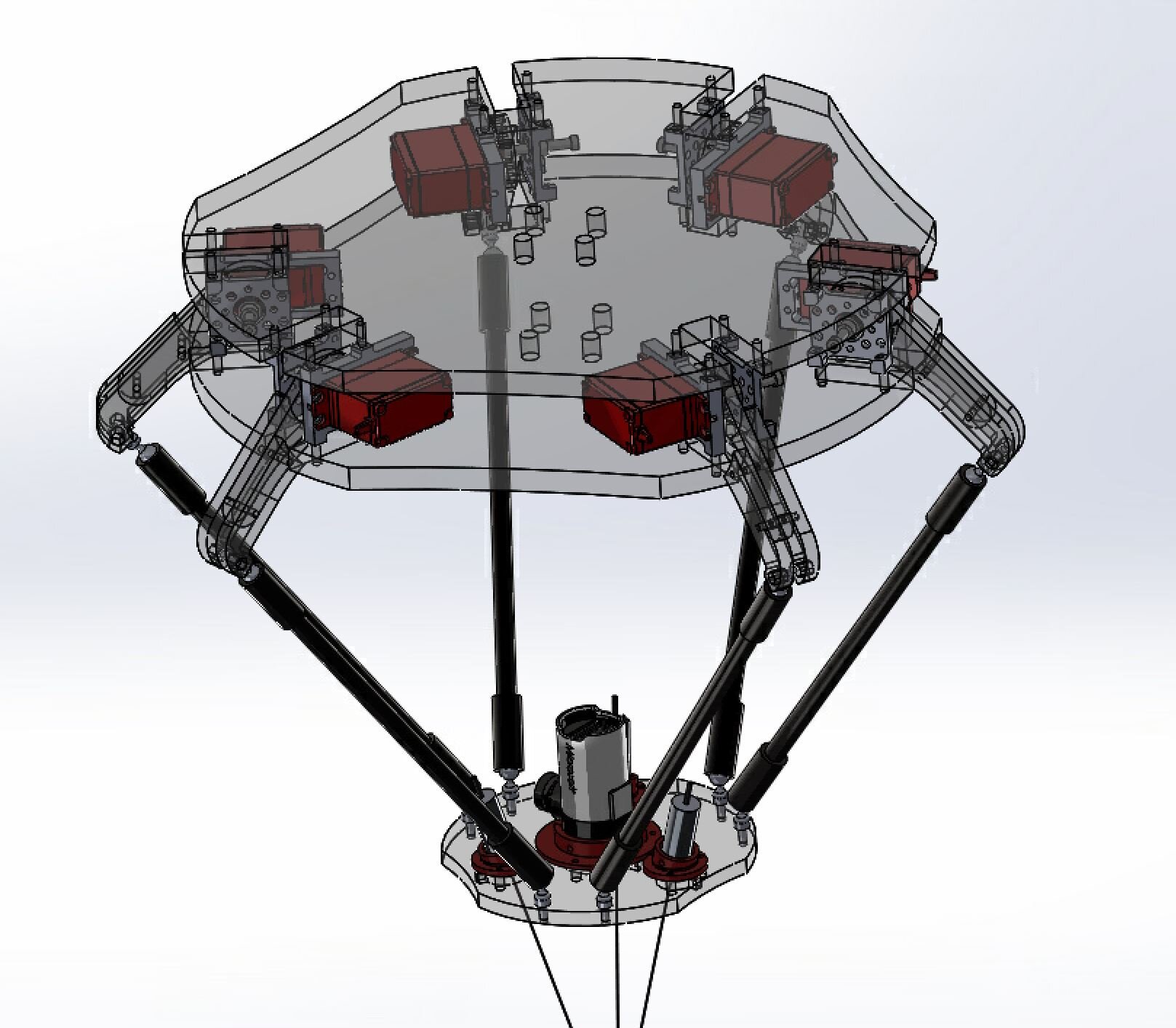
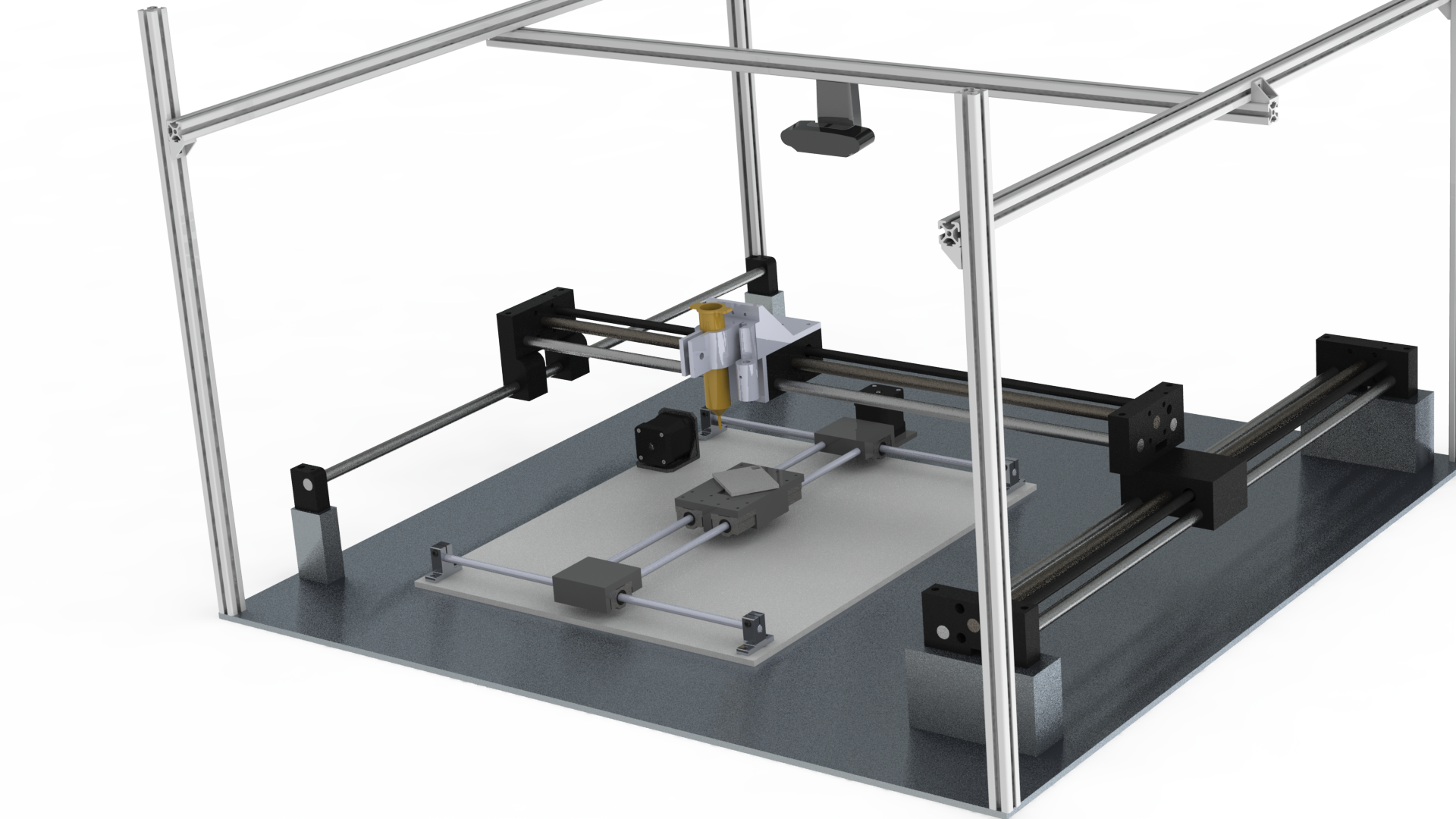
Helped design and developed a gantry robot system that uses dynamic vision sensors and cameras to track and 3D print on a moving object in real time using ROS
Makerbot Industries New York City, New York
Mechanical Engineer Intern May 2016 to August 2016
Designed and optimized an active cooling duct for future generation 3D printers using SolidWorks modeling and simulation capabilities
Conducted and designed tests to measure torque in several areas of the 3D printer
School of Physics and Astronomy - University of Minnesota Minneapolis, Minnesota
Physics Teaching Assistant September 2015 to December 2015
Facilitated disclosure between 20 students and the instructor while holding office hours to tutor students
Performed demonstrations during lectures and addressed student conceptual difficulties
SJE Rhombus Detroit Lakes, Minnesota
Manufacturing Engineer Intern May 2015 to August 2015
Designed, improved, and machined various testing adapters used in the facility increasing ease of use and efficiency by 30%
Conducted cost benefit analysis on $100,000+ selective soldering machines to be implemented in the facility
Volunteer Experience
Engineers Without Borders Minneapolis, Minnesota
Group Leader August 2015 to May 2017
Lead in the design of pressure break tanks, water taps, and water meters using Creo Pro/E
Designed and implemented a water distribution system for the community of Xiquin Sanahi in Guatemala - Traveled to Guatemala in August of 2015
Skills & Relevant Courses
Software: SolidWorks, Creo Pro/E, Unigraphics NX, Autodesk Inventor, AutoCAD, Robot Operating System (ROS), MATLAB, Autodesk EAGLE, Siemens TIA
Machines: Mill, Lathe, Band Saw, Thickness Planer, Jointer, Laser Cutter, 3D Printer, CNC
Analog and Digital Control
Python
C++
Mechanisms and Machines
Advanced Control System Design
Electrical Circuits
Robotics Sensing and Estimation
Computer Aided Engineering
Activities and Honors
American Society of Mechanical Engineers
National Society of Collegiate Scholars
Fall 2014 to Present
Spring 2014 to May 2017

Projects
Click on each project to find out more.
Current Projects
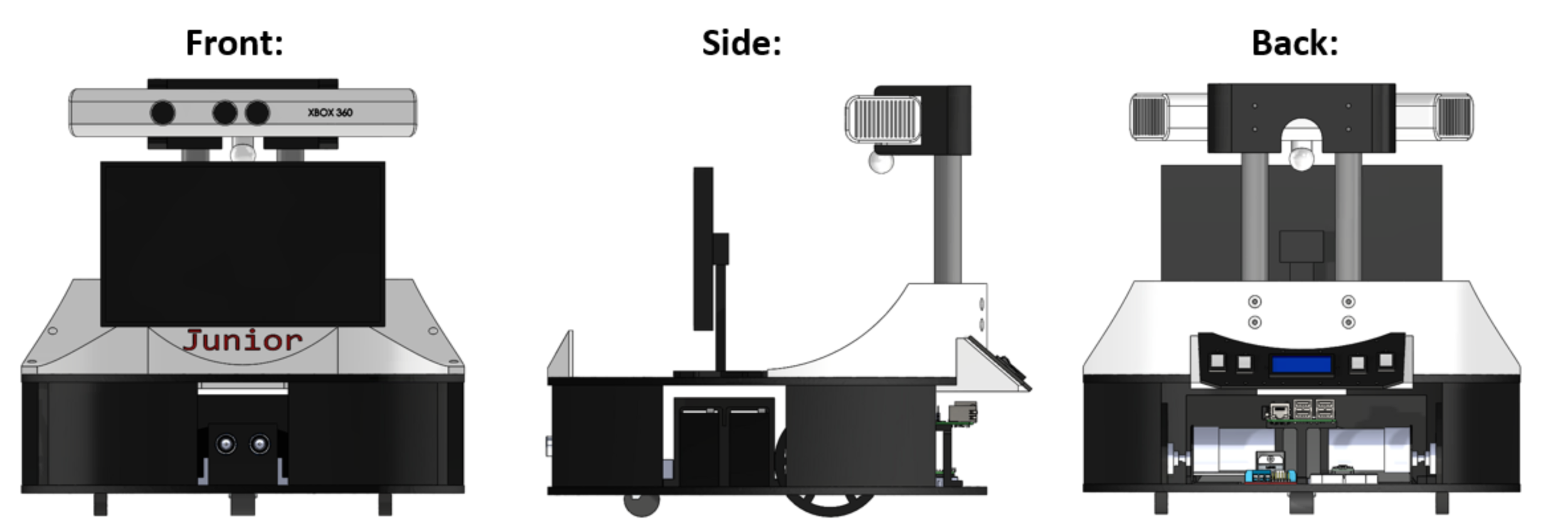
Senior Robot
A successor to Junior (below). Senior is a 4 wheeled robot designed to run off of different types of computers. This includes an Arduino, Raspberry Pi 3, and an Nvidia Jetson TX2.

Past Projects
Husky (Masters Thesis)
Autonomous navigation on sidewalks in urban neighborhoods under all weather conditions using LIDAR and GNSS.

Hexa Robot
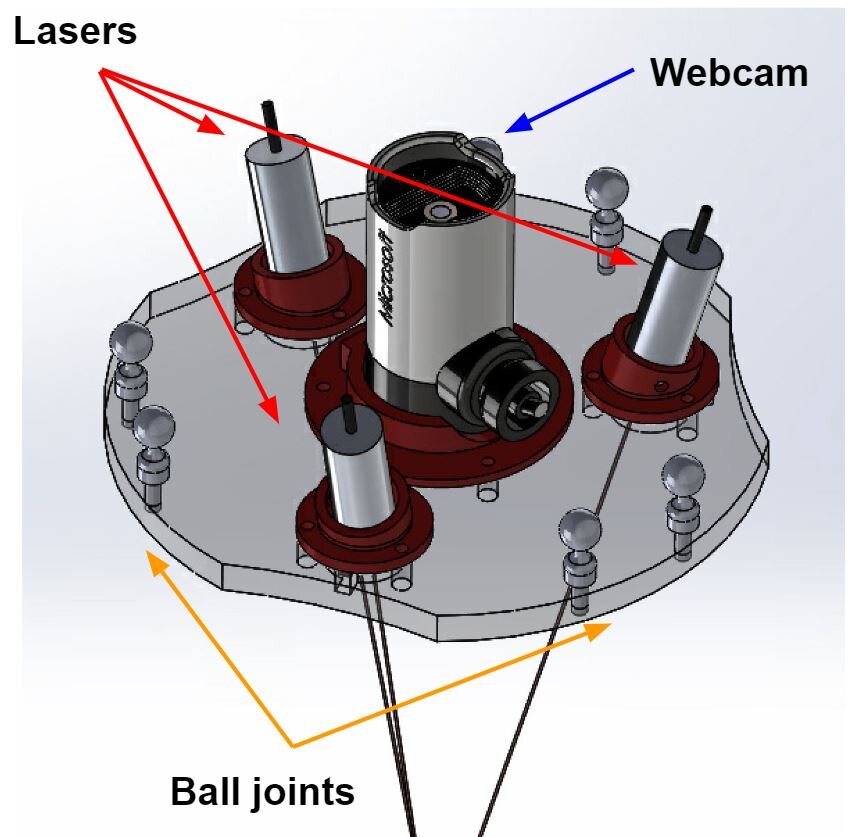
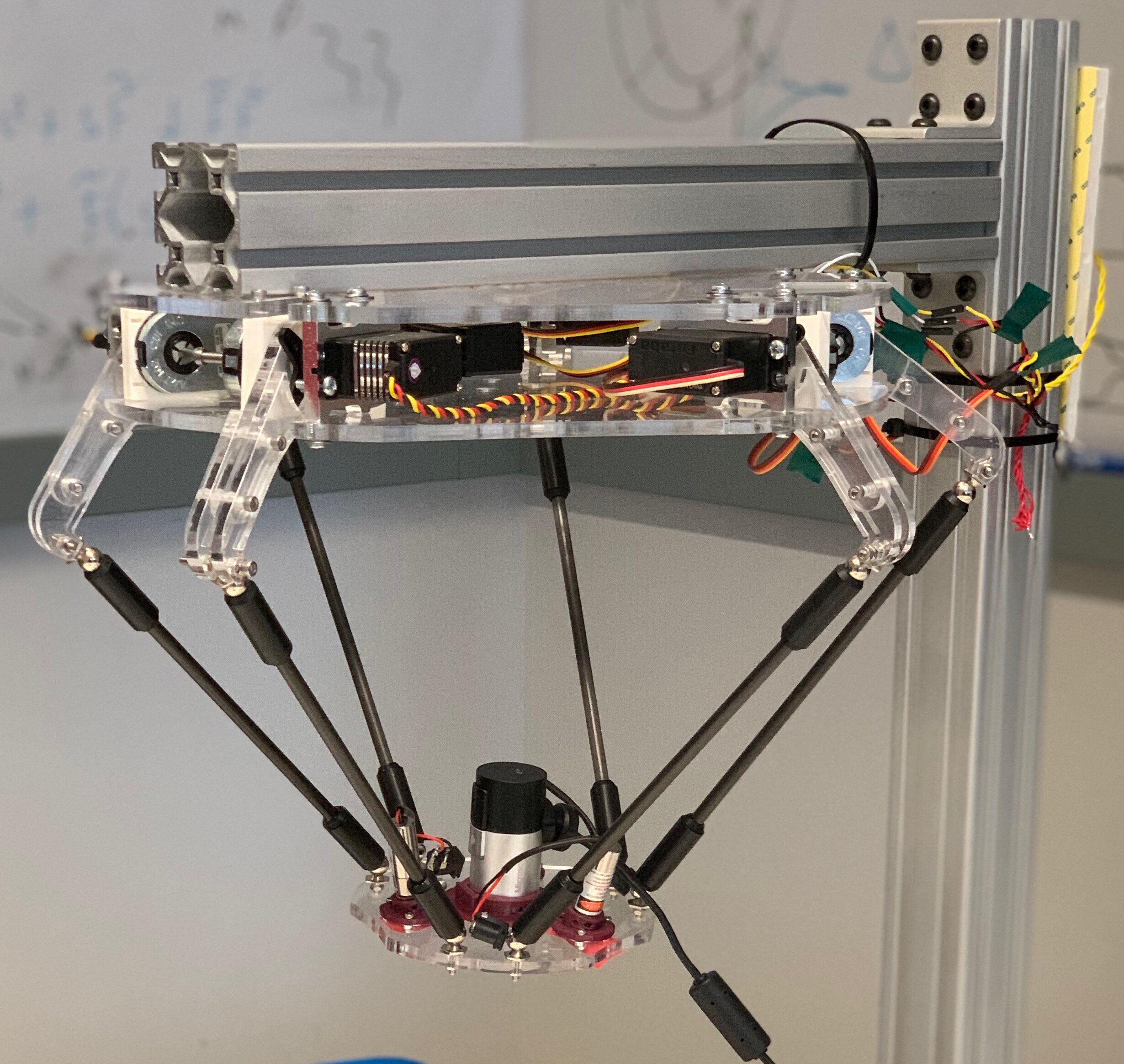
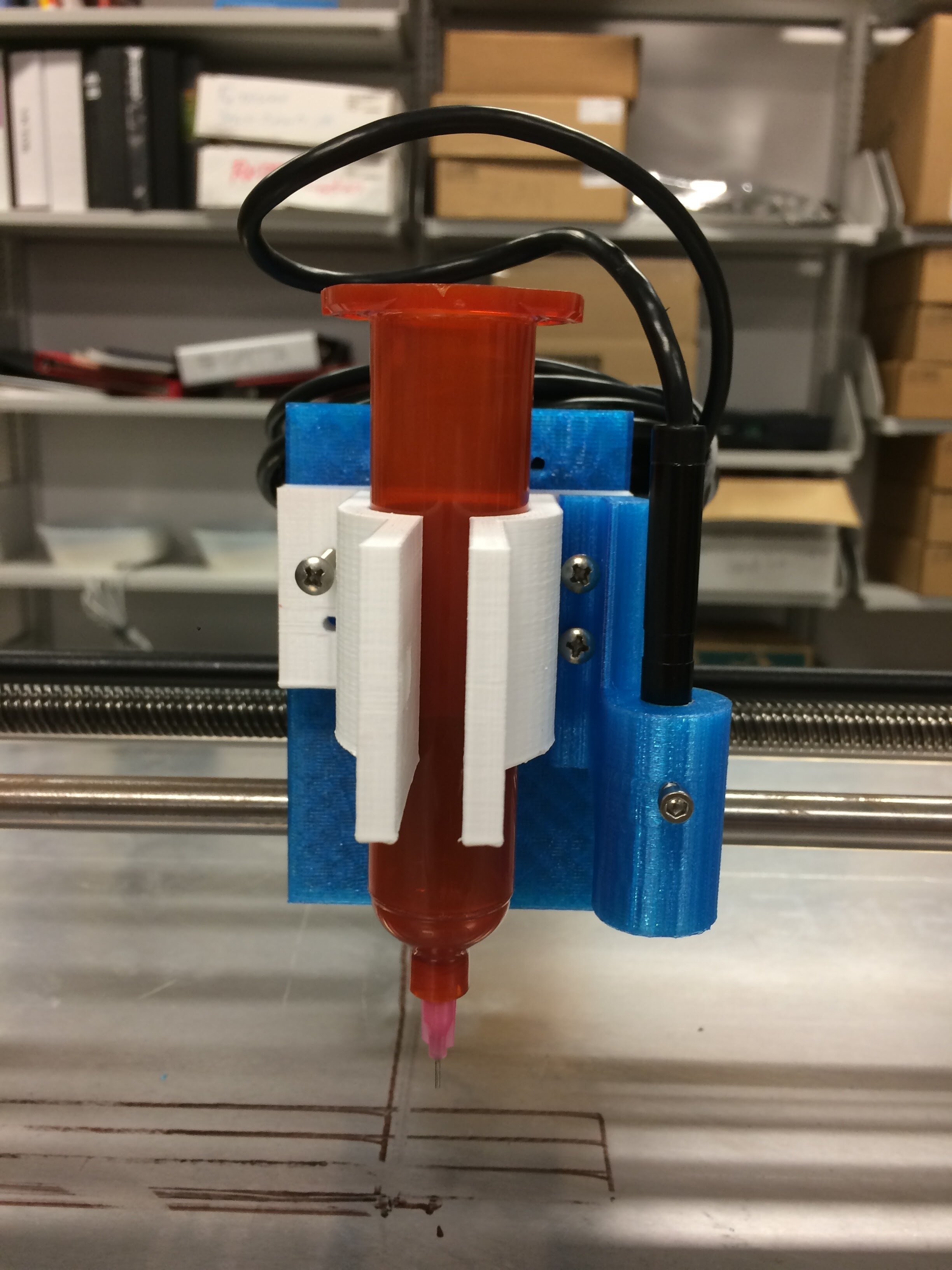
A Delta-Inspired, Multi-Degree of Freedom Robot with Deformable Surface Tracking for Bioprinting Applications


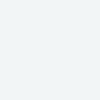
3D Printing onto Moving Target
Designing and developing a robotic system to 3D print on moving objects.

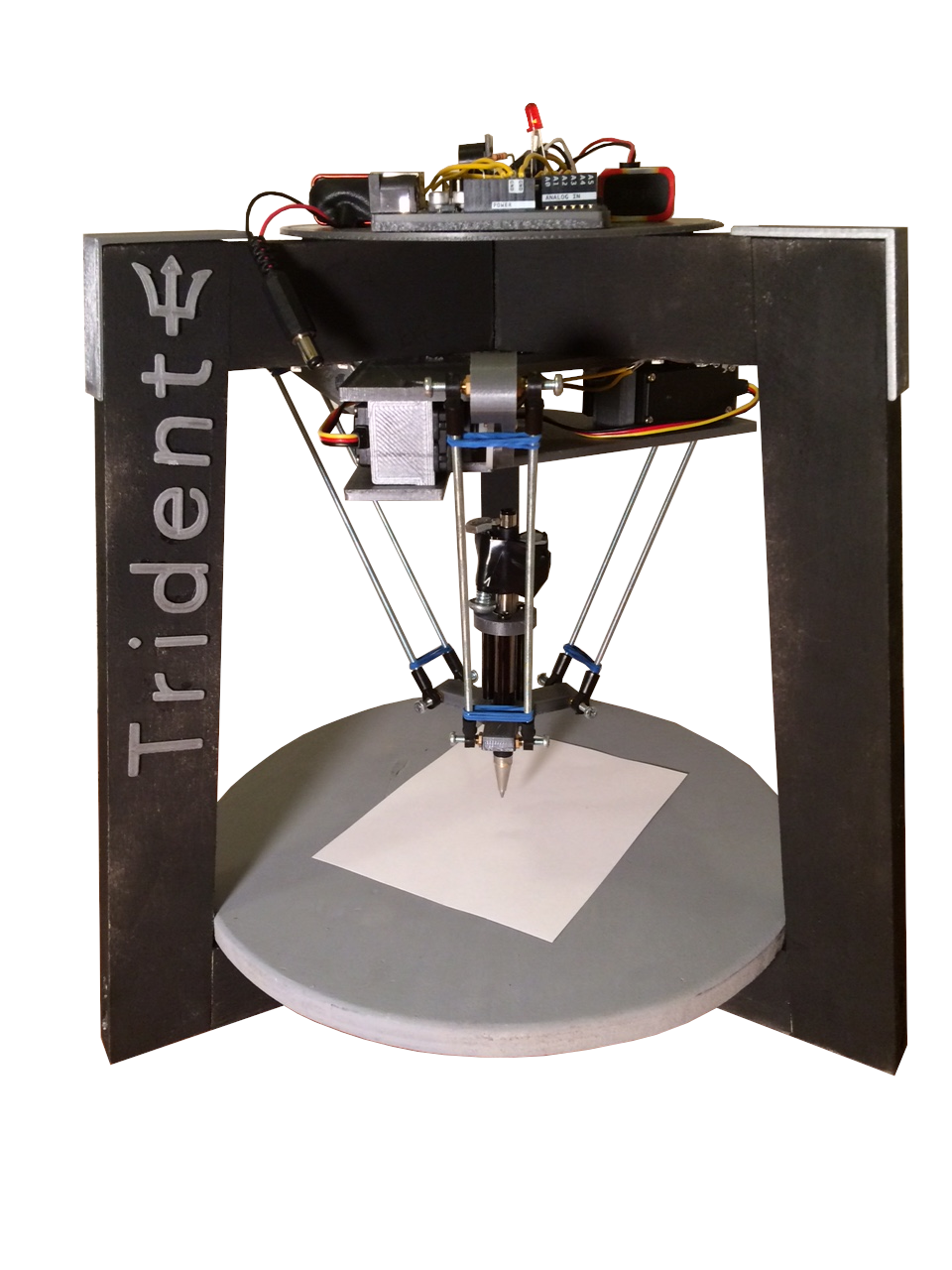
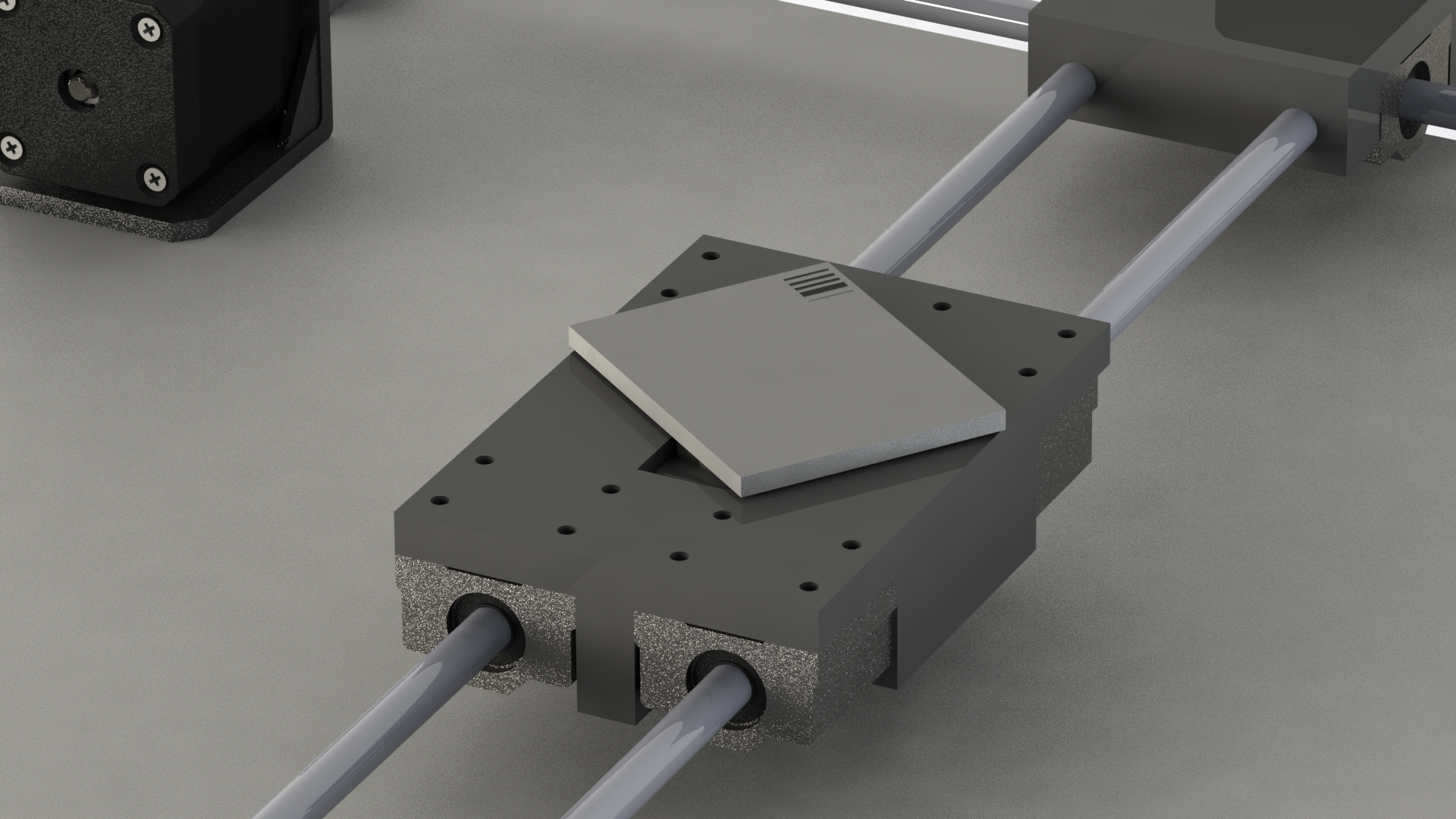
Trident
Designing and creating a Delta style robot that draws the University of Minnesota ‘M’ with a pen.

Publications
Reed A. Johnson, John J. O'Neill, Rodney L. Dockter, Carl J. Modl, and Timothy M. Kowalewski. “Comparison of Bio-Inks for Free-Hand 3D Bioprinting Directly Onto Moving Human Anatomy”. The Hamlyn Symposium on Medical Robotics, 2018. (PDF) (Video)
Reed A. Johnson, John J. O'Neill, Rodney L. Dockter, and Timothy M. Kowalewski. “Toward Inkjet Additive Manufacturing Directly onto Human Anatomy”. ASME Journal of Medical Devices, 2017. (PDF)
John O'Neill, Reed Johnson, Rodney Dockter, and Timothy Kowalewski. “3d Bioprinting Directly onto Moving Human Anatomy”. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017. (PDF) (Video)
Presentations
Connected and Automated Vehicle Technologies Workshop Lecturer “Incorporating LIDAR, GNSS, and IMU Sensors for Autonomous Navigation”, 2019
Design of Medical Devices Conference Invited Speaker “Towards Bioprinting onto Human Anatomy” , 2017
Contact